Geomagnetic Reference Field
The International Geomagnetic Reference Field (IGRF) is a standard mathematical description of the Earth's main magnetic field, produced and endorsed by the International Association of Geomagnetism and Aeronomy (IAGA). It is widely used in studies of the Earth's deep interior, crust, ionosphere, and magnetosphere.
Magnetic field in SAR context
An accurate magnetic field model is essential for example for space weather corrections in ionospheric modelling.
The IGRF Model
The IGRF represents the Earth's magnetic field as the negative gradient of a scalar potential \(V\) expanded in spherical harmonics up to degree 13:
where:
- \(a = 6371.2\) km is the geomagnetic reference Earth radius
- \(r\) is the radial distance from the Earth's centre [km]
- \(\theta\) is the geocentric colatitude [degrees]
- \(\phi\) is the longitude [degrees]
- \(P_n^m\) are the Schmidt semi-normalized associated Legendre functions
- \(g_n^m, h_n^m\) are the Gauss coefficients of degree \(n\) and order \(m\), linearly interpolated in time
The magnetic field is then obtained as:
The model is updated every five years. The implemented IGRF-14 iteration was released in October 2024 and covers
the period 1900–2030. Secular variation coefficients are pre-computed into the shipped .shc coefficient file.
Scalar Magnetic Potential
The function get_geocentric_igrf_potential directly evaluates the scalar magnetic potential \(V\) at given geocentric
coordinates. This is useful when the potential itself (rather than the field) is required.
Coordinate Systems
Two coordinate frames are supported for field evaluation:
Geocentric (Spherical)
Used by get_geocentric_igrf. Input coordinates: [radius (km), colatitude (deg), longitude (deg)].
Output magnetic field components:
| Component | Direction |
|---|---|
| \(B_r\) | Radial (positive outward) |
| \(B_\theta\) | Southward (tangential, decreasing colatitude) |
| \(B_\phi\) | Eastward (tangential) |
Geodetic (WGS84)
Used by get_geodetic_igrf. Input coordinates: [longitude (deg), latitude (deg), height (km above WGS84 ellipsoid)].
The geocentric-to-geodetic conversion accounts for the ellipsoidal shape of the Earth (WGS84) and rotates the magnetic field vector accordingly.
Output magnetic field components:
| Component | Direction |
|---|---|
| \(B_e\) | Eastward |
| \(B_n\) | Northward (tangential to the ellipsoid) |
| \(B_u\) | Upward (perpendicular to the ellipsoid) |
Derived Magnetic Field Angles
Two angular quantities can be derived from the geodetic field components:
-
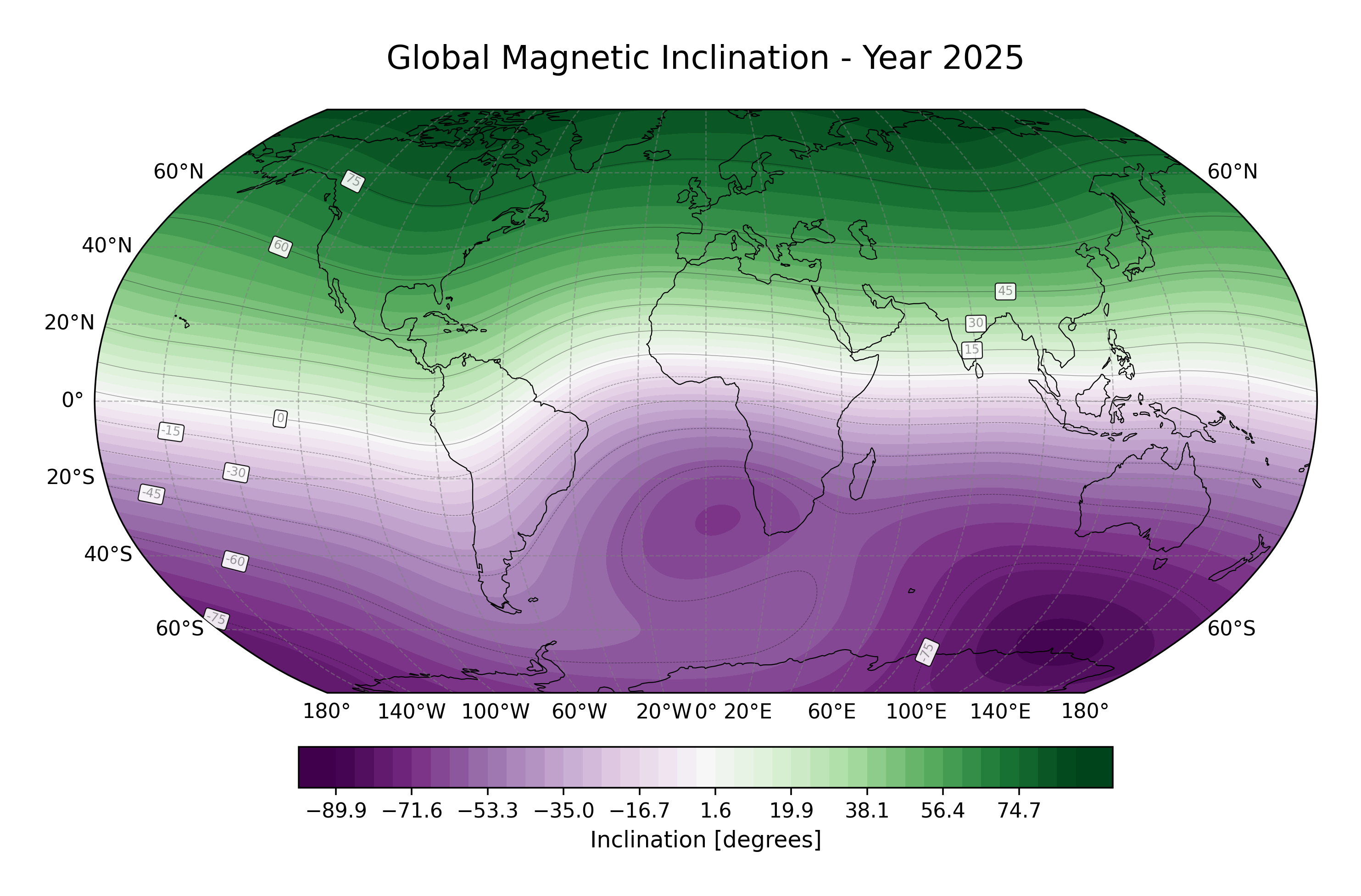
Inclination (\(I\)): angle between the field vector and the horizontal plane, -Bu to match the standard definition of \(I>0\) -> downward.
\[ I = \arctan \left(\frac{-B_u}{\sqrt{B_e^2 + B_n^2}}\right) \] -
Declination (\(D\)): angle between true north and magnetic north at a particular location. If \(D>0\), the magnetic declination is East, otherwise West..
\[ D = \arctan2 \left(B_e, B_n\right) \]
References
- International Association of Geomagnetism and Aeronomy (2024) "IGRF-14". Zenodo. https://doi.org/10.5281/zenodo.14218973
- The implementation is based on the
IAGA-VMOD/ppigrfproject by Karl M. Laundal, Santiago Soler, Ashley Smith, Andreas S. Skeidsvoll and Daniel Billett. https://doi.org/10.5281/zenodo.14231854 - Schmidt semi-normalized Legendre functions algorithm from Wertz, James R. (1978) "Spacecraft attitude determination and control". https://doi.org/10.1007/978-94-009-9907-7